by Oleg Dzhimiev
Description
Running OSLO’s optimization has shown that having a single operand defined is probably not enough. During the optimization run the program computes the derivative matrix for the operands and solves the least squares normal equations. The iterations are repeated with various values of the damping factor in order to determine the optimal value of the damping factor.
So, extra operands were added to split the initial error function – each new operand’s value is a contribution to the spot size (blurring) calculated for each color, aberration and certain image heights. See Fig.1 for formulas.
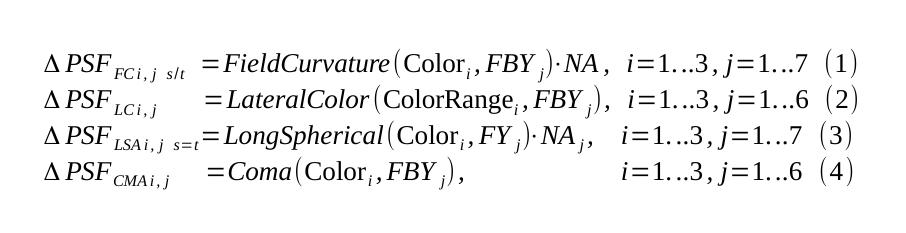
Fig.1 Extra Operands
by Oleg Dzhimiev
Description
The Error Function calculates the 4th root of the average of the 4th power spot sizes over several angles of the field of view.
(more…)
by Oleg Dzhimiev
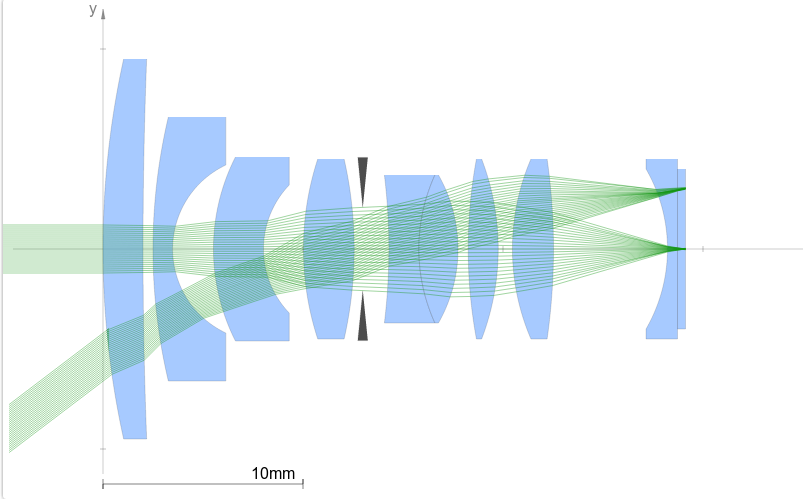
Elphel has embarked on a new project, somewhat different from our main field of designing digital cameras, but closely related to the camera applications and aimed to further improve image quality of Eyesis4π camera. Eyesis4π is a high resolution full-sphere panoramic and stereophotogrammetric camera. It is a tiled multi-sensor system with a single sensor’s format of 1/2.5″. The specific requirement of such system is uniform angular resolution, since there is no center in a panoramic image.
(more…)
by Oleg Dzhimiev
There’s a number of online lens calculators already and this one is not conceptually different – the focus is on the current sensor we use and the main feature is visualization done in
HTML canvas using
jCanvas.
(more…)
by Oleg Dzhimiev
1. Get X Virtual FrameBuffer
sudo apt-get install xvfb
2. Launch ImageJ (“cd” to the ij.jar directory):
Xvfb :15 &
DISPLAY=:15 java -Xmx12288m -jar ij.jar -run "TestIJ Plugin"
Comments:
- TestIJ Plugin is the name of the compiled plugin in the ImageJ menu. No need to specify a subfolder.
- :15 is an example.
Links that helped:
- Source 1
- Source 2
- Source 3
by Oleg Dzhimiev
We made a new Live USB version of Elphel Toolkit.
It is available for downloading here.
Software
It is an entire Operating System that can be booted from a USB drive or DVD (of course you can install it on your computer as well) and comes with all Elphel relevant software preinstalled. As the basis we chose
Kubuntu 10.04 LTS (Long Term Support distribution) 32-bit which is supported by its developers until April 2013. Everything described on our
Software Kit wiki page is preinstalled. That allows you to update the camera firmware (reflash), play a live video-stream from a camera and also build a custom firmware image for the camera.
(more…)
by Oleg Dzhimiev
We are proud to add a new product and camera KIT to the Elphel portfolio. See the pricelist.
The NC353L-369-IMU/GPS is a new camera configuration with an Inertial Measurement Unit (IMU) and optional GPS receiver. In addition to storing the geographical coordinates with each captured image in a video stream this allows to also save 3D orientation (yaw, pitch and roll) and 3D acceleration (Six Degrees of Freedom Inertial Sensor) of the camera at the moment of capturing an image at very high precision (2400 samples/second). A detailed description can be found in the previous post.
by Andrey Filippov

WebGL Panorama Editor (view mode)
This April we attached Eyesis camera to a backpack and took it to the Southern Utah. Unfortunately I did not finish the IMU hardware then so we could rely only on a GPS for tagging the imagery. GPS alone can work when the camera is on the car, but with a camera moving at pedestrian speed (images were taken 1-1.5 meters apart) it was insufficient even in the open areas with a clear view of the sky. Additionally, camera orientation was changing much more than when it is attached to a car that moves (normally) in the direction the wheels can roll. Before moving forward with the IMU data processing we decided to try to orient/place some of the imagery we took manually – just by looking through the panoramas, adjusting the camera heading/tilt/roll to make them look level and oriented so the next camera location matches the map. Just tweaking the KML file with the text editor seemed impractical to adjust hundreds of panoramic images so we decided to add more functionality to our simple WebGL panorama viewer, make it suitable for both walking through the panorama sets and for the editing orientations and locations of the camera spots. (more…)
by Oleg Dzhimiev
UPD: Google has updated their Salt Lake City images in their StreetView – so, the comparison is better now.
Click here for the active view (resizeable)

Description
Works in Firefox 4.0 and Chrome. Does NOT work in Firefox 3.6.X.
The above sample shows how custom panoramas (in our case: a panorama we shot with our Elphel Eyesis) can be integrated in a custom StreetView.
Elphel Eyesis images is the top-left window. The top-right window is the current (lower resolution) official Google Street View in Salt Lake City supposedly made by the 2nd or 3rd generation of GSV cameras.
The Open Street Map is for switching between the available panorama points and the Google Map with a pegman is filling the otherwise unused space at the same time generously showing the view direction.
(more…)