First Elphel Eyesis Prototype assembled
 Andrey spent months of planning and designing these parts and yesterday we finally had the joy of assembling the first panoramic camera head prototype utilising 9 sensor boards. This new panoramic camera head is called Elphel Eyesis. A few metal parts are still missing but the heart of the system – the optical part – is now completed. The extremely small size drastically reduces parallax (wikipedia explanation) see ruler for size comparison. The system allows to gather 360° panoramas at ~38 Mpix (45Mpix before stitching) at min. 5 fps (lower resolutions allow higher fps while covering the same field of view). The images below also show the pretty complex internal mechanical systems that allow each sensor to be mechanically fine tuned (2 axis tilt, focus plane distance).
Andrey spent months of planning and designing these parts and yesterday we finally had the joy of assembling the first panoramic camera head prototype utilising 9 sensor boards. This new panoramic camera head is called Elphel Eyesis. A few metal parts are still missing but the heart of the system – the optical part – is now completed. The extremely small size drastically reduces parallax (wikipedia explanation) see ruler for size comparison. The system allows to gather 360° panoramas at ~38 Mpix (45Mpix before stitching) at min. 5 fps (lower resolutions allow higher fps while covering the same field of view). The images below also show the pretty complex internal mechanical systems that allow each sensor to be mechanically fine tuned (2 axis tilt, focus plane distance).
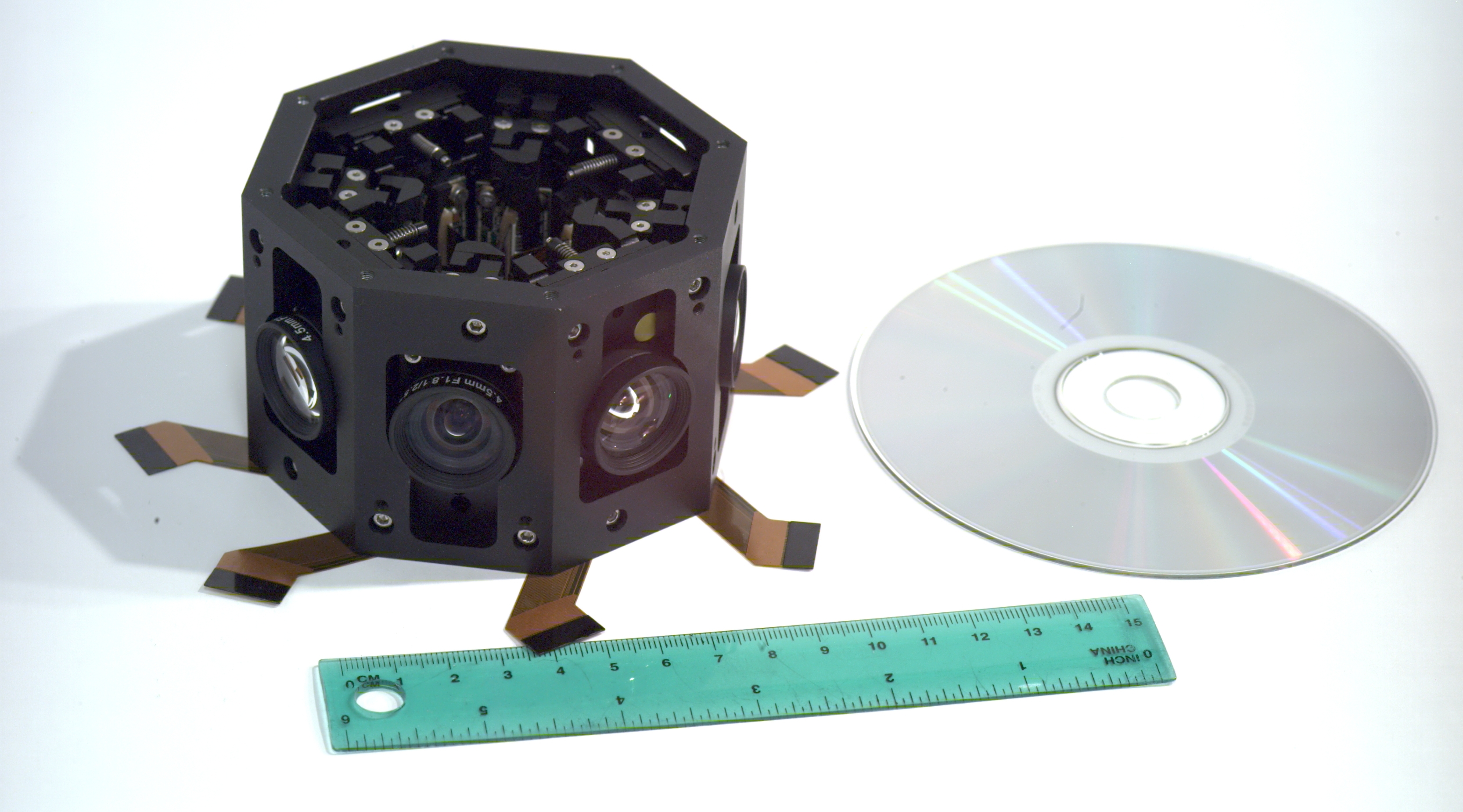
I could not resist taking an Elphel 323 camera off the shelf and using it to shoot the pictures of Elphel Eyesis with this incredibly huge full frame 35mm Kodak sensor – in the end I had to close iris pretty far as the ruler was already completely out of focus with the head sharp 🙂

I am looking at immersivemeda and ladybug3 for 360 video. I am not impressed with the quality of the videos. When can we expect to see sample video from this camera?
Hi Dominic,
Those cameras you mentioned have lower resolution but higher frame rate. This our camera is designed to provide only 5 fps images but with higher quality (later the same optical head will have the full speed with the next 10373 system boards).
We are currently working on the automatic focusing and sensor tilt adjustment – the camera head has the adjustment screws designed to be driven by the motors during in-factory adjustment and calibration. And we are still waiting for some of the parts, I believe we’ll have real imagery in 6-8 weeks.
Andrey
As Andrey says Eyesis was not designed for video applications, with the new 373 board (still in development) Eyesis will be able to provide real time video though.
If you want a solution right now I would suggest the last entry of: http://www3.elphel.com/353_turnkey or like 8x NC353L with the 90 degree accessory part: http://www3.elphel.com/accessories
With Eyesis it would also be possible to use on-sensor-decimation (pixel skipping) to lower resolution while maintaining field of view to achieve higher frame rates, though this will result in reduced image quality.
The following values are calculated from a single camera and not yet tested with the real multi camera head:
no skipping: 5 fps
1x skipping: 15 fps
2x skipping: 28 fps
3x skipping: 42 fps
Hello, I am really interested about the idea of full open-source camera and software for videogeotagging applications. I am looking for solutions for 2 different business: 1. videogeotagging my city (and another 5 in the next 3 months – a total of 20.000km of paved roads); 2. 360o video for a number of applications.
In a way I am attracting for the facilities of Dodeca and its enviroment (software and contacts), but in another way I am also attracting for Eyesis open-solution (cameras, os, softwares, etc).
My question is, if I buy yours solutions, would you be able to help my company to setup everything we need to be ready to shoot on street level and put the images on the market? This means help us to set up the car, computer, software and then, give us a support to download the video and metadata and put it on a format that would be usable for mapping industry (like Bing Maps, Google Maps, Mapquest or even flash-webapplications)?
thanks
Rodcer
Hi!!
We are developing similar projects
http://www.officinepanottiche.com/blog/
I research in this field since 1998, now I\’m curious to measure the equation parallax-size-fisheyes in reducing stitching errors (and minimum taking distance) while mantaining the 360×180, with the smallest amount of cameras possible, and shooting video possibilities…
So, what is sensor size?
How much are these cameras you are using?
What kind of lenses do they take?
Thanx!!
Hi Luca,
We are using our camera modules (10353E, 10369A, 10338D), you can find more info about them on our wiki (http://wiki.elphel.com/index.php?title=353 ), the sensor size is 1/2.5″ – the same one we are successfully using with the 353 cameras for some time. This current design uses high resolution M12 mount lenses that allow denser packaging than with C-mount lenses, the sensor boards (10338D) is also a modified version of the 10338B designed to reduce the size for the same goal of reducing parallax – it is 15mm x 29mm.
So the price of the cameras used do not apply to our case exactly (we use Elphel parts – some produced earlier, some – specially designed), the final price of a complete system is still subject to adjustments.
Andrey
Hello Rodcer,
We really believe the open solutions in this area – there are multiple companies throughout the world interested in such applications in their countries and cities. That means that sharing technology and software among them can serve to the benefit of all without sacrificing competitive advantage of each – it is not likely that say a mapping (or real estate) company in St.Petersburg, Russia can be a competitor to a similar one in say Shenzhen, China.
As for making the imagery compatible with “mapping industry” – I do not believe the companies you mentioned have any common standards, I would recommend you to look towards another organization – Open Street Map (http://www.openstreetmap.org/ , http://en.wikipedia.org/wiki/Open_Street_Map ).
Andrey