July 16, 2021
by Andrey Filippov and Fyodor Filippov
Advance Steel 2024: https://abcoemstore.com/product/autodesk-advance-steel-2024/ System Requirements Learn about the system requirements for configuring Advance Steel.
Download links for: video and captions.
This research “Long-Range Thermal 3D Perception in Low Contrast Environments” is funded by NASA contract 80NSSC21C0175
July 21, 2018
by Olga Filippova
In this blog article we will recall the most interesting results of Elphel participation at CVPR 2018 Expo, the conversations we had with visitor’s at the booth, FAQs as well as unusual questions, and what we learned from it. In
The Expo lasted from June 19-21, and each day had it’s own focus and results, so this article is organized chronologically.
Day One: The best show ever!

June 19, CVPR 2018, booth 132
While we are standing nervously at our booth, thinking: “Is there going to be any interest? Will people come, will they ask questions?”, the first poster session starts and a wave of visitors floods the exhibition floor. Our first guest at the booth spends 30 minutes, knowledgeably inquiring about Elphel’s long-range 3D technology and leaves his business card, saying that he is very impressed. This was a good start of a very busy day full of technical discussions. CVPR is the first exhibition we have participated in where we did not have any problems explaining our projects.
The most common questions that were asked:
(more…)
June 20, 2018
by Olga Filippova

Elphel booth at CVPR 2018 Expo
Elphel is presenting at CVPR 2018 EXPO: Long Range Passive 3D Reconstruction System, providing NN with custom training sets, enabling realtime 3D-aware machine learning systems.
Please visit us at CVPR, Booth 132.
You can also find our presentation and related articles on wiki page https://wiki.elphel.com/wiki/CVPR2018
-

-
Gnu and Open Hardware are here
-

-
Andrey and Oleg at the booth132
-

-
Elphel Presentation at CVPR 2018 Expo
-

-
getting ready for the busy day at CVPR 2018
-

-
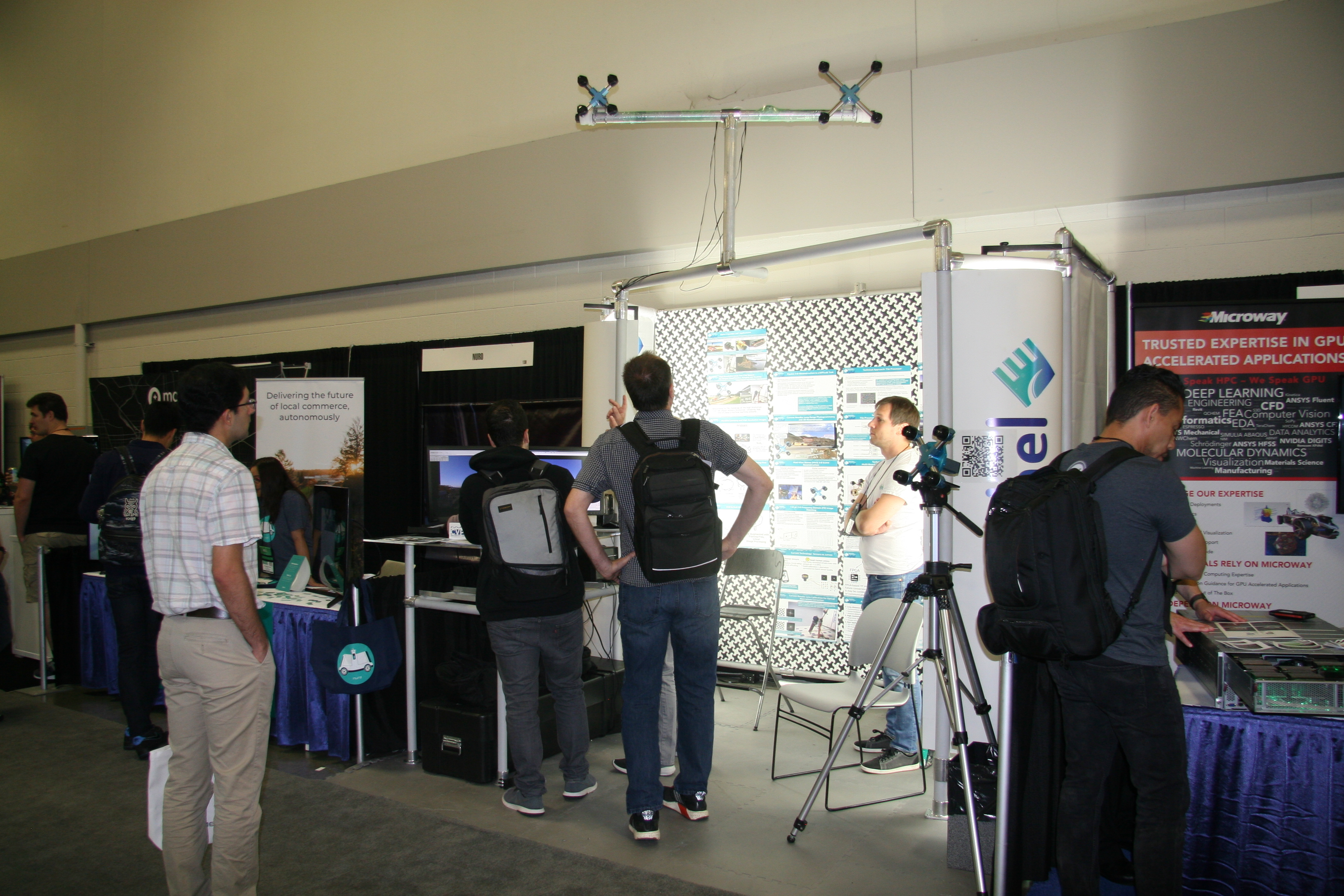
Visitors at the Booth 132
-

-
creating 3-D model of the CVPR 2018 Expo
December 13, 2017
by Olga Filippova

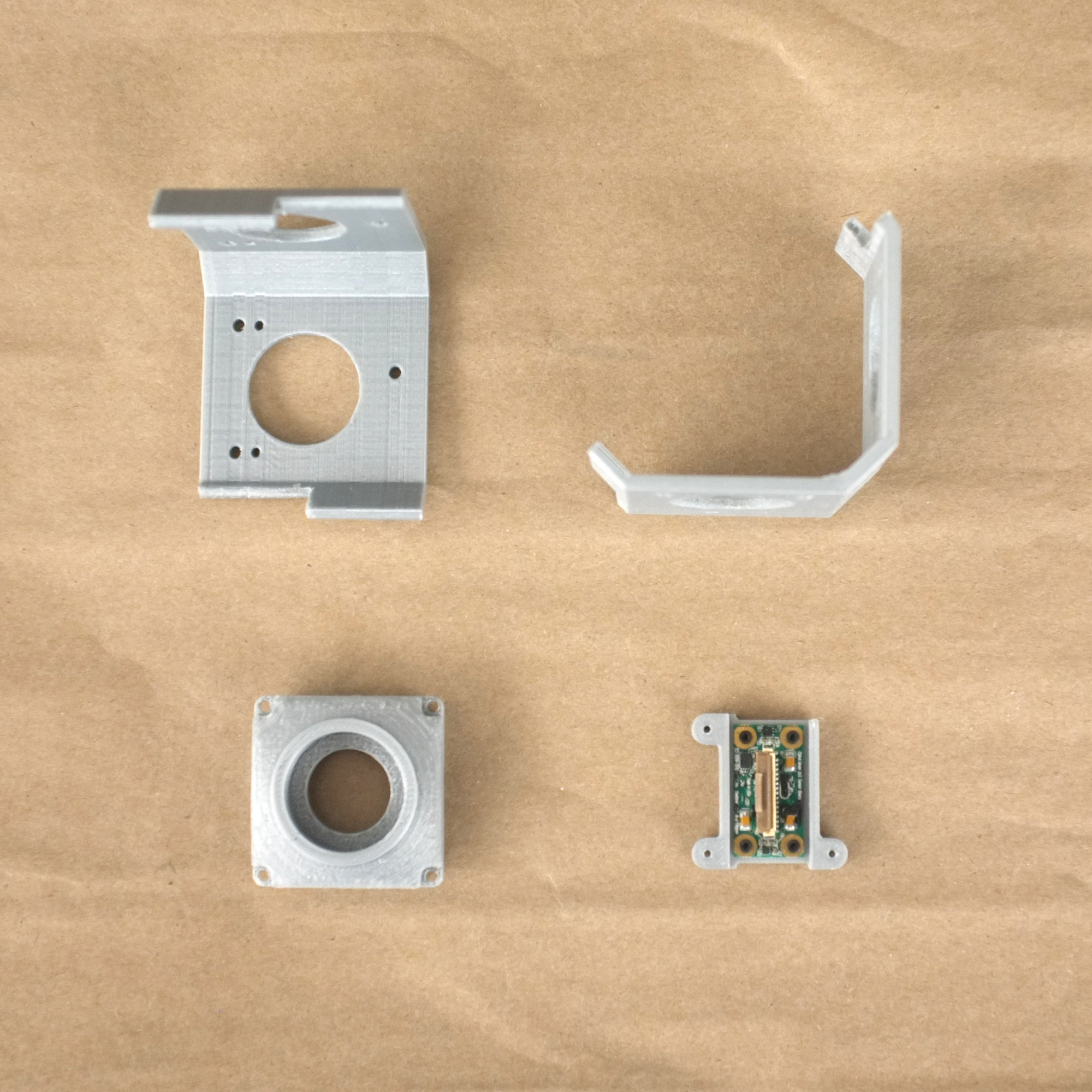
MNC393-XCAM partial assembly and parts
The long anticipated parts for the Long range camera have arrived!
The mechanical parts for the MNC393-XCAM – Long Range Multi-view Stereo Camera are machined, tested, and ready to be anodized. This enables us to have the X-camera assembled before the winter holidays. The holiday break will provide a good opportunity to test the camera, capture new photos, and create robust 3D models from calibrated images.
The titanium X-frame of the camera ensures thermal stability required for continuous accuracy of 3D measurements. The aluminum enclosure and sealed lens filters weatherproof the system allowing for the proposed outdoor use of the camera.
We intend to assemble two cameras: one with a 150 mm distance between the sensors and another with a longer baseline. The expected accuracy for the camera with the shorter baseline is greater than 10% at a 200 meter distance. We have achieved 10% accuracy with H-camera with calibrated sensors, even though the 3D-printed parts were not thermally stable and some error was accumulated over time. It was a very pleasant surprise that the software was still able to deal with somewhat un-calibrated images and detect distances very accurately, creating impressive 3D-scenes: Scene_viewer The second camera will have a 280 mm distance between sensors, which is determined by the longest FPC cables we can use without signal losses. It promises to double the measured distance with the same degree of accuracy, therefore an extremely long range 3D-scenes will be produced.
The Long Range Multi-View Stereo Camera with 4 sensors MNC393-XCAM is planned for release in early 2018.
October 2, 2016
by Olga Filippova
On October 8th, 2016 Andrey will be presenting his work on VDT – Free Software Environment for FPGA Development at an open source digital design conference, ORCONF 2016. ORCONF 2016
The conference will take place in Bologna, Italy, and we are glad for the possibility to meet some of European users of Elphel cameras, and to connect with the community of developers excited about open source design, free software and open hardware.
Elphel will be present at the conference by Andrey Filippov from USA headquarters and Alexadre Poltorak, founder of Swiss 3D4Pi mobile mapping company, working closely with Elphel to integrate Eyesis4Pi, stereophotogrammetric camera, for the purpose of image based 3D reconstruction applications. Andrey will bring and demonstrate the new multisensor NC393 H-camera and Alexandre plans to take some panoramic footage with Eyesis4Pi camera, while in Bologna.
April 21, 2016
by Olga Filippova
We have created a short video tutorial to help our users navigate through 3D models of Elphel cameras. Cameras can be virtually taken apart and put back together which helps to understand the camera configuration and access information about every camera component. Please feel free to comment on the video quality and usefulness, as we are launching a series of tutorials about cameras, software modifications, FPGA development on 10393 camera board, etc. and we would like to receive feedback on them.
(more…)
February 11, 2016
by Olga Filippova
The components for 10393 and other related circuit boards for the new NC393 camera series have been ordered and contract manufacturing (CM) is ready to assemble the first batch of camera boards.
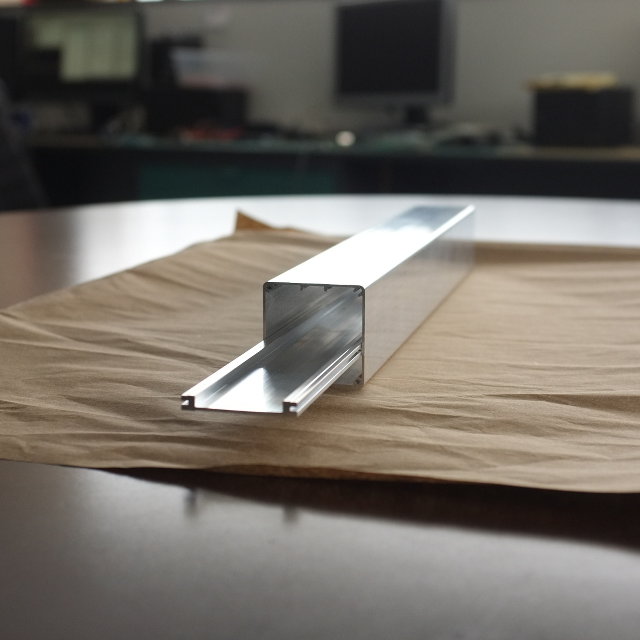
In the meantime, the extruded parts that will be made into NC393 camera body have been received at Elphel. The extrusion looks very slick with thin, 1mm walls made out of strong 6061-T6 aluminium, and weighs only 55g. The camera’s new lightweight design is suitable for use on a small aircraft. The heat frame responsible for cooling the powerful processor has also been extruded.
We are very pleased with the performance of Profile Precision Extrusions located in Phoenix, Arizona, which have delivered a very accurate product ahead of the proposed schedule. Now we can proudly engrave “Made in USA” on the camera, as now even the camera body parts are made in the United States.
Of course, we have tried to order the extrusion in China, but the intricately detailed profile is difficult to extrude and tolerances were hard to match, so when Profile Precision was recommended to us by local extrusion facilities we were happy to discover the outstanding quality this company offers.
While waiting for the extruded parts we have been playing with another new toy: the 3D printer. We have been creating prototypes of various camera models of the NC393 series. The cameras are designed and modelled in a 3D virtual environment, and can viewed and even taken apart by mouse click thanks to X3dom technology. The next step is to build actual parts on the 3D printer and physically assemble the camera prototypes, which will allow us to start using the prototypes in the physical world: finding what features are missing, and correcting and finalizing the design. For example, when the mini-panoramic NC393-4PI4 camera prototype was assembled it was clear that it needs the 4 fins (now seen on the final model) to protect the lenses from touching the surfaces as well as to provide shade from the sun. NC393-4PI4 and NC393-4PI4-IMU-GPS are small 360 degree panoramic cameras assembled with 4 fish-eye lenses especially suitable for interior panoramic applications.
The prototypes are not as slick as the actual aluminium bodies, but they give a very good example of what the actual cameras will look like.
As of today, the 10393 and other boards are in production, the prototypes are being built and tested for design functionality, and the aluminium extrusions have been received. With all this taken care of, we are now less than one month away from the NC393 being offered for sale; the first cameras will be distributed to the loyal Elphel customers who have placed and pre-paid orders several weeks ago.
July 19, 2012
by Olga Filippova

Tuesday August 7th – Thursday August 9th
Los Angeles Convention Center, Main Hall , Booth 1058
Elphel will present Eyesis4Pi – high resolution full sphere stereophotogrammetric camera at SIGGRAPH 2012, together with it’s calibration machine. We will demonstrate full calibration process to compensate for optical aberrations, allowing to preserve full sensor resolution over the camera FOV, and distortions – for precise pixel-mapping for photogrammetry and 3D reconstruction.
All Elphel camera users are welcome, current and prospective, as well as parties interested in Eyesis4Pi. Here (booth 1058 – see plan) you can talk to the camera developers, see the calibration process and touch the actual working hardware. There is a number of passes available for exhibition only. Please contact Olga Filippova if you would like to receive one.
April 26, 2011
by Olga Filippova

Eyesis Backpack with Netbook for initial set-up
Tacking high-resolution panoramic images in the remote places, that can only be accessed by feet is an option now available with the Elphel-Eyesis 360 degree panorama camera. The camera’s size (1.3 x 0.3 meters) and relatively light weight (10kgs) allow to mount it on a backpack frame and carry by a person.
There were multiple requests for the backpack option by our customers since the development of Elphel-Eyesis camera, but other projects were of higher priority, until this spring, when we finally decided it was time to take Eyesis hiking. After all, we have worked hard on this project for many months, so we ought to have some fun with it too, and take panorama images of the places we knew and enjoyed for it’s scenery.
On April 19th, 2011, we took the Elphel mobile office to camp for 5 days in Southern Utah near the Goblin Valley State Park to try out Eyesis in beautiful places not yet available in continuous panoramic imagery, mainly because of their inaccessibility for car, ATV, or even a tricycle.
Hiking with Eyesis in the backpack (30 lbs/14 kg total weight with the battery pack) allows us to capture a continuous stream of geotagged (GPS) 360° panoramic images. With the current battery pack (just a regular UPS with lead battery) we can take up to one hour and forty minutes of footage at a rate of 5 frames per second.
(more…)
October 5, 2010
by Olga Filippova

Elphel will participate in the UTOSC, October 7-9, 2010, with a presentation on October 8, at 11:30 am.
Free and Open Source software is still more common then Open Hardware and we would like to discuss our experience in designing and manufacturing high performance network digital cameras and the benefits of Open Hardware development.
In our presentation we will talk about:
- Benefits of being Open Hardware company from the business point of view.
- Pros and cons of developing a High Performance Open Hardware.
- Camera as a development platform. Easy customizable software (HTML, JavaScript, PHP) and firmware (Verilog HDL) allows modifying cameras to specific applications.
- Reconfigurable nature of hardware designed as a set of high-performance building blocks ready for a variety of configurations.
- Examples of applications.
- Future developements.
- Collaboration with Open Source community.
Please come join us for presentation and in our booth at UTOSC
Next Page »